Given vectors A B ⃗ \vec{AB} A B C D ⃗ \vec{CD} C D A = ( x 1 , y 1 ) A=(x_1,y_1) A = ( x 1 , y 1 ) B = ( x 2 , y 2 ) B=(x_2,y_2) B = ( x 2 , y 2 ) C = ( x 3 , y 3 ) C=(x_3,y_3) C = ( x 3 , y 3 ) D = ( x 4 , y 4 ) D=(x_4,y_4) D = ( x 4 , y 4 )
A B ⃗ = ( x 2 − x 1 , y 2 − y 1 ) C D ⃗ = ( x 4 − x 3 , y 4 − y 3 ) \vec{AB}=(x_2-x_1, y_2-y_1)\\
\vec{CD}=(x_4-x_3, y_4-y_3)
A B = ( x 2 − x 1 , y 2 − y 1 ) C D = ( x 4 − x 3 , y 4 − y 3 )
Let the angle between the vectors A B ⃗ \vec{AB} A B C D ⃗ \vec{CD} C D θ \theta θ
c o s ( θ ) = A B ⃗ ⋅ C D ⃗ ∣ ∣ A B ⃗ ∣ ∣ ⋅ ∣ ∣ C D ⃗ ∣ ∣ cos(\theta)=\frac{\vec{AB} \cdot \vec{CD}}{||\vec{AB}|| \cdot ||\vec{CD}||}
c o s ( θ ) = ∣ ∣ A B ∣ ∣ ⋅ ∣ ∣ C D ∣ ∣ A B ⋅ C D
The Python code for the formula is as follows:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 import mathclass point (): def __init__ (self, id , x, y ): self.id = id self.x = x self.y = y start_point_l1 = point("l1 start point" , 2.4 , 5.2 ) end_point_l1 = point("l1 end point" , 4.2 , 3.1 ) start_point_l2 = point("l2 start point" , 1.6 , 3 ) end_point_l2 = point("l2 end point" , 6.2 , 5.6 ) delta_x = start_point_l1.x - end_point_l1.x delta_y = start_point_l1.y - end_point_l1.y delta_x_edge = start_point_l2.x - end_point_l2.x delta_y_edge = start_point_l2.y - end_point_l2.y cos_value = (delta_x * delta_x_edge + delta_y * delta_y_edge) \ / (math.sqrt(delta_x * delta_x + delta_y * delta_y) * math.sqrt(delta_x_edge * delta_x_edge + delta_y_edge * delta_y_edge)) currRoadAngle = math.degrees(math.acos(cos_value)) print ("The angle between two straight lines: " , currRoadAngle)
1 The angle between two straight lines: 78.87459435824127
1 The angle between two straight lines: 42.91155696958662
1 The angle between two straight lines: 149.3002774491856
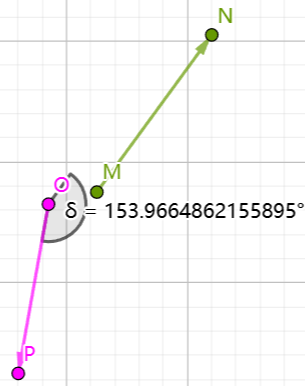
1 The angle between two straight lines: 153.9664862155895
1 The angle between two straight lines: 0.0
1 The angle between two straight lines: 90.0
1 The angle between two straight lines: 180.0